




|
商品検索
|
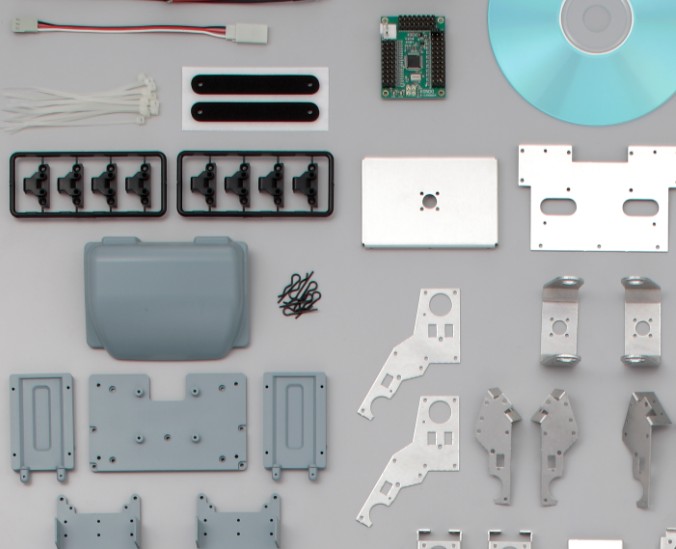
■マテリアル
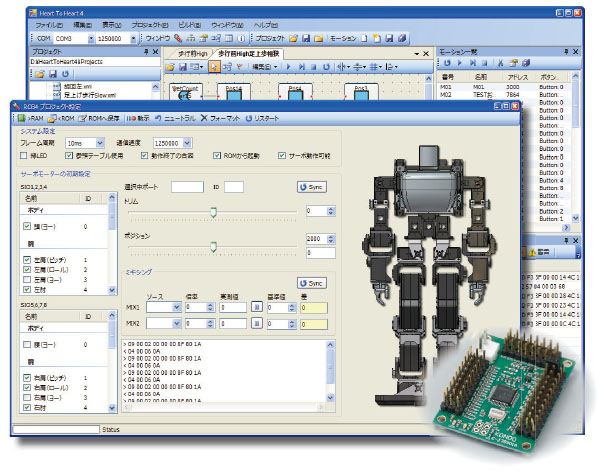
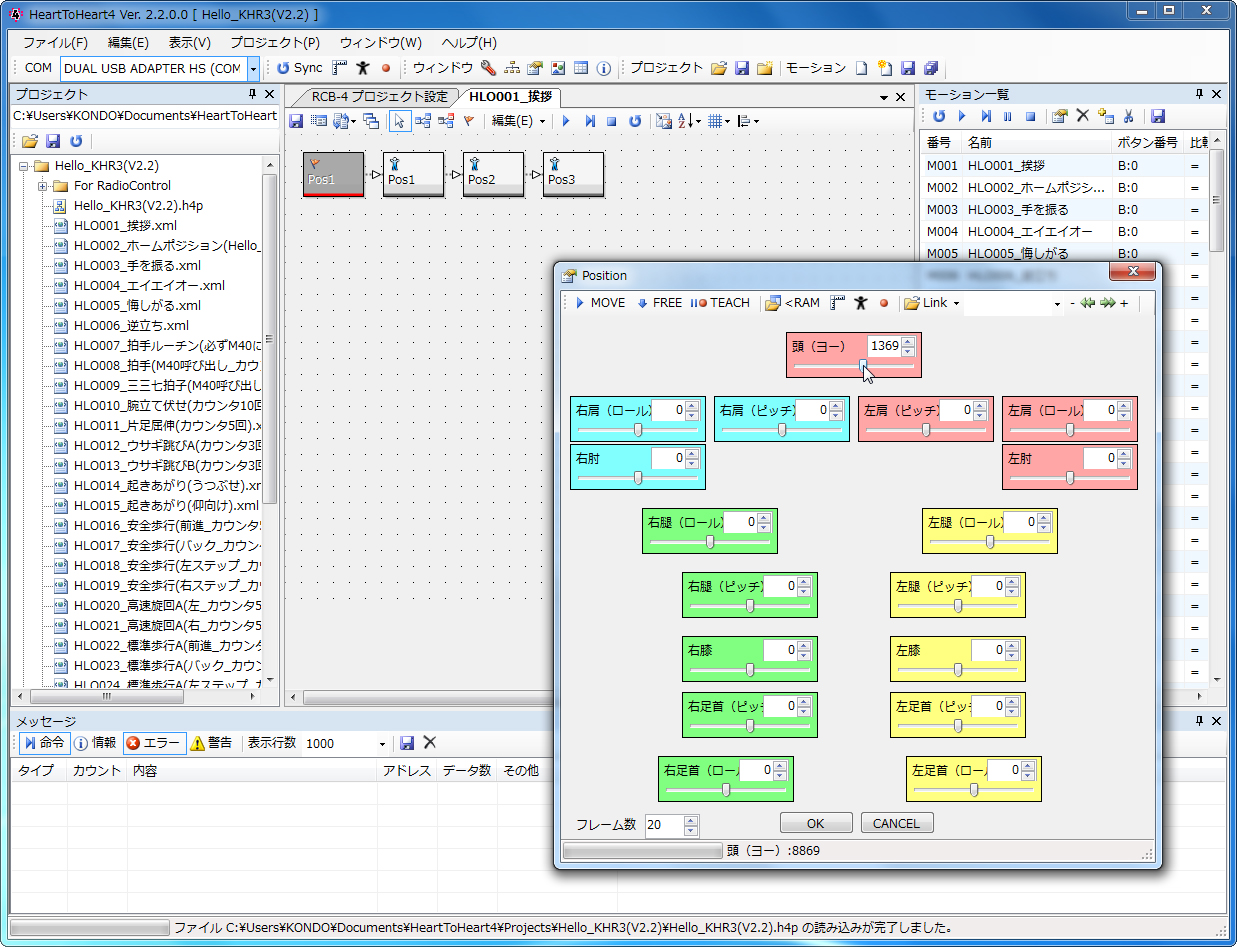
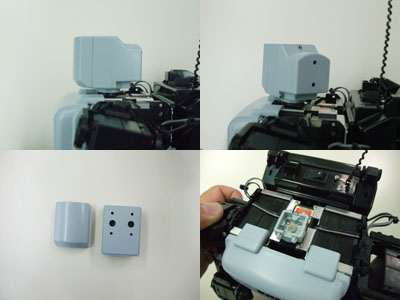
・RCB-4HVとKRS‐2552RHVの組み合わせで、最高1.25Mbpsの高速での通信が可能(初期値:115200bps)。 ・高速な通信が可能なので、これまでのモーションを再生する際のサーボの位置データの送信を行いつつ、接続した対応機器側から、さまざまなフィードバックを受け取ることも可能。 ・高速通信に対応したシリアル通信インターフエースとして、Dual U SBアダプターHSが付属。  ・シリアルとPWMを切り替えて使用する事が可能。また、各パラメーターも細かく設定できるようになりました。 ICS3.5の詳しい機能は下記のアドレスをご覧下さい。 ▼サポートページ『ICS3.5 解説』 https://kondo-robot.com/sys/archives/3508 ●大容量バッテリーと急速充電器 ・今回は大容量Dタイプのニッケル水素バッテリーが標準セットに含まれます。 ・約1時間半で急速充電が可能で、放電機能付きの急速充電器(MX-201)が標準セット。 ・標準以外の大容量バッテリーを搭載できるバッテリースペース。
■拡張性 ・遠隔操作 インターフェースKRI-3(別売)を使用することで、従来の受信機KRR-1とコント□―ラKRC-1/KRC-3での無線操縦が可能。ボタンによるコマンド指令や、アナログスティックを使用したミキシングなど多彩なモーションが楽めます。  ・最大22軸拡張 製品標準では17軸の自由度ですが、ダミーサーボをサーボに交換することで、簡単に22軸までの増設が可能。22軸にした場合、重量は増しますが、サイズが変わらないために、それまで、作成したモーションの流用が最小限の修正で可能。 
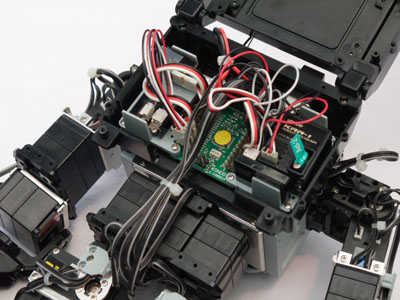
↑腰、両脚ヨー軸、腕の5箇所にダミーサーボが見えます。  ↑拡張5個セットを追加し、22軸使用の状態。 ・センサー入力 RCB-4HVは、豊富なI/0ポート・AD入カポートがあるため、さまざまなセンサーを接続してコントロールすることが可能。ジャイロセンサー、カロ速度センサー、近接センサーなど応用はアイデアしだい!拡張により無限の可能性がひろがります。
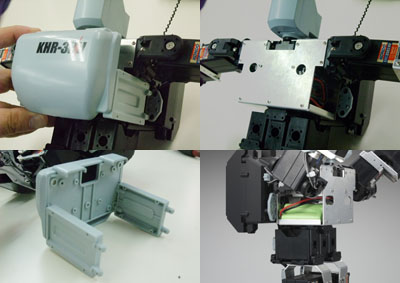
■完成後は箱がキャリングケース KHR-3HVの箱は、完成後にKHR-3HVやオプションパーツががすっぽり入るサイズ。送信機も一緒に入りるので、ロボットの持ち運びに大変便利。 
|
|||||||||||||||||||||||||




 ■KHR-3HV
Ver.2の特徴
■KHR-3HV
Ver.2の特徴